Controlador P
Nas figuras seguintes pode-se ver o comportamento de um sistema com diferentes valores de Kp, para um sistema com função de transferência
![]() .
.
![]() .
.
Como se pode observar nas figuras, o sistema tende a oscilar com maior amplitude e frequencia, à medida que se aumenta o ganho proporcional do controlador. No caso em que o Kp=100, a situação é tão extramente que seria inviavel implementar o controlador P.
Assim amentando o Kp reduz-se o erro em regime permanente, manten-se o tempo de estabelecimento, mas aumenta-se a instabilidade e o percent overshoot. O aumento do percent overshoot pode ser corrigido utilizando tambem a ação derivativa.
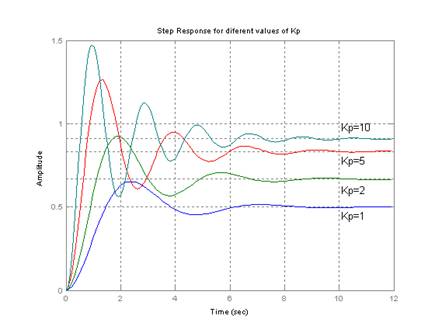
Resposta a um degrau com Kp=1, 2, 5 e 10
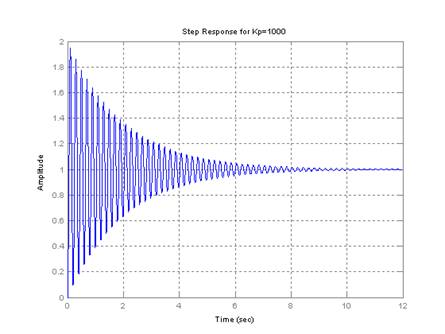
Resposta a um degrau com Kp=1000