Controlador PD
Este controlador implementa as acções de controlo proporcional e derivativa, e cuja expressão matemática é aquela apresentada a seguir.
![]()
![]() – ganho proporcional do controlador
– ganho proporcional do controlador
![]() – constante de tempo derivativo
– constante de tempo derivativo
![]() – acção de controlo em estado estacionário
– acção de controlo em estado estacionário
![]() – erro
– erro
![]() - acção de controlo.
- acção de controlo.
Para este controlador quanto maior for o ![]() mais cedo se atinge o tempo de subida, como se pode ver na figura seguinte.
mais cedo se atinge o tempo de subida, como se pode ver na figura seguinte.
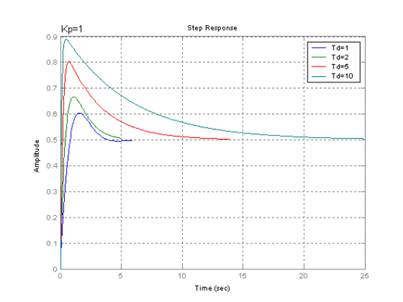
Resposta para diferentes valores de τd(entrada em degrau com sistema em malha fechada)
Se o ![]() for muito grande (ex.
for muito grande (ex. ![]() ), a subida é representada por uma recta vertical, como se pode ver na figura a seguir.
), a subida é representada por uma recta vertical, como se pode ver na figura a seguir.
Mas em termos fisicos este tipo de resposta é impraticável.
Este tipo de controlador também causa o aumento do tempo de estabelecimento e do overshoot.
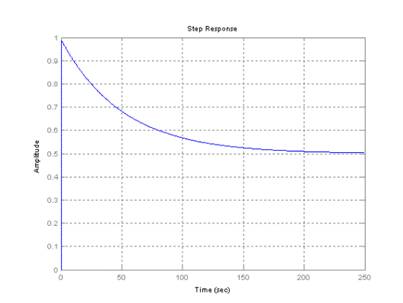
Resposta para τd=100 (entrada em degrau com sistema em malha fechada)