Controlador PID analogico
A sigla PID é de integral, proporcional e derivativo, que termos de controlo, quer dizer que este tipo de controlador implementa as acções proporcional, integral e derivativa para produzir um sinal de controlo. Devido a grade robustez deste tipo de controlador ele é grandemente usado na indústria.
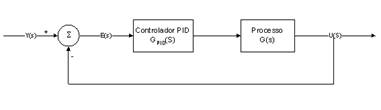
Esquema básico de um sistema com controlador PID
A equação matemática que descreve o controlador PID analógico é a seguinte:
![]() (61)
(61)
Onde ![]() – ganho proporcional do controlador
– ganho proporcional do controlador
![]() – constante de tempo integral
– constante de tempo integral
![]() – constante de tempo derivativo
– constante de tempo derivativo
![]() – acção de controlo em estado estacionário
– acção de controlo em estado estacionário
![]() – erro
– erro
![]() - acção de controlo.
- acção de controlo.
-
Acção proporcional
Esta acção é sempre aplicada.
Alguns processos simples podem ser controlados satisfatoriamente apenas com esta acção. Então neste caso tem-se apenas
![]() (62)
(62)
Mas normalmente esta acção não consegue eliminar o erro em regime permanente. Para diminuir esse erro pode-se aumentar o ganho proporcional mas ao fazer isso pode-se estar a fazer com que o sistema oscile e que até se pode tornar instável.
Este tipo de controlo é constituído apenas por um amplificador com ganho ajustável, em que a entrada é o erro (variável de referencia – variável de saída) e a saída é a variável de controlo.
-
Acção Integral
Esta acção elimina o erro estacionário que resulta quando se usa apenas a acção proporcional, mas em contra partida, a resposta do sistema pode ficar instável e pode mesmo ocorrer a saturação do controlador (fenómeno de ‘wind-up’).
![]() (63)
(63)
Fenómeno de “Wind-up”.
O fenómeno de “Wind-up” ocorre, quando o valor da variável de controlo atinge o limite máximo, ou mínimo, do actuador, fazendo com que o sinal de controlo sature. Isto faz com que o actuador permaneça no seu limite máximo, ou mínimo, independente mente da saída do sistema.
Mas quando se usa um controlador com acção integral, como neste caso, o erro continua a ser integrado e o termo integral tende a tornar-se muito grande.
Para que o controlador saia da saturação é necessário que o termo integral diminua. Para que tal aconteça deve-se esperar que o sinal de erro troque de sinal e, por um longo período tempo, seja aplicado na entrada do controlador, um sinal de erro de sinal oposto. Disto resulta que a resposta transitória do sistema tenderá a ficar lenta e oscilatória.
- Acção Derivativa.
A acção derivativa provoca um efeito antecipativo na resposta, pois baseia-se no cálculo da derivada do erro, que normalmente provoca a atenuação do efeito oscilatório causado pela acção integral, normalmente esta acção provoca uma melhoria na resposta do sistema, mas evita-se a sua utilização em sistemas que apresentem muito ruído.
![]() (64)
(64)
Em resumo, a acção proporcional tem como função reduzir o tempo de subida (rise time), que é o tempo que o sinal demora a ir dos 10% aos 90% do seu valor máximo, e também diminuir o erro em regime permanente.
A acção integral deve eliminar o erro em regime permanente, mas em contra partida irá piorar a resposta transitória
A acção derivativa tem como objectivo aumentar a estabilidade do sistema, reduzindo o overshoot (sobrelevação do valor de saída relativamente ao valor estabelecido) e melhorando a resposta transitória.
A tabela 1 apresenta o efeito de cada uma das acções de controlo.
É importante referir, que devido aos factores serem dependentes entre si, esta correlação pode não ser correcta. Por exemplo a mudança de valor de uma das variáveis, pode fazer com os valores das outras também varie. Logo a tabela 1 deve apenas ser usada para determinar os valores de Kp, ![]() i e
i e ![]() d.
d.
O setting time (referido na tabela 1) é o tempo que a variável de saída demora a atingir 2% do valor em regime permanente.
Tabela 1 - Influencia das várias acções do controlador PID
Rise Time |
Overshoot |
Setting time |
e( |
|
Kp |
Diminui |
Aumenta |
Sem efeito |
Diminui |
|
Diminui |
Aumenta |
Aumenta |
Elimina |
|
Sem efeito |
Diminui |
Diminui |
Sem efeito |
Em controlo industrial normalmente usa-se a percentagem de banda proporcional (%BP) em vez do ganho proporcional (Kp).
![]() (65)
(65)
A banda proporcional significa a gama de variação que o erro tem que varrer de modo a saturar a saída do controlador.
- Desempenho do controlador.
A alteração dos parâmetros do controlador também causara uma alteração na resposta do sistema, como se pode ver figura 8.
Como se pode observar na figura seguinte, se ![]() e
e ![]() forem iguais 1, a resposta do sistema é semelhante a de um sistema de primeira ordem, variando o valor dos parâmetros, a resposta do sistema altera-se, apresentando um comportamento em que o sistema não estabiliza tão rapidamente como quando todos os parâmetros são iguais a 1.
forem iguais 1, a resposta do sistema é semelhante a de um sistema de primeira ordem, variando o valor dos parâmetros, a resposta do sistema altera-se, apresentando um comportamento em que o sistema não estabiliza tão rapidamente como quando todos os parâmetros são iguais a 1.
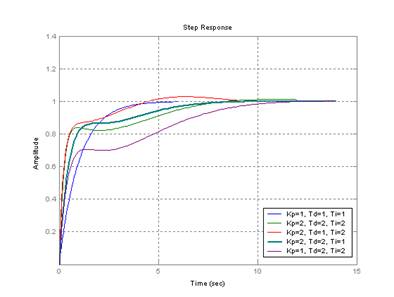
Resposta de um controlador PID para diferentes parâmetros do controlador (entrada em degrau com sistema em malha fechada)
Idealmente a resposta de um sistema a uma entrada em degrau unitário com um controlador PID, teria um tempo de subida, um percent overshoot e um erro em regime permanente iguais a 0, mas esta situação é impossível de se implementar fisicamente.
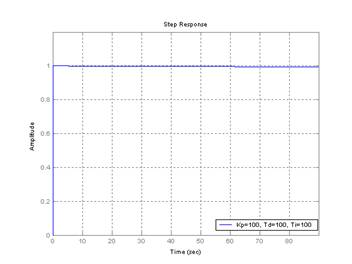
Resposta ideal de um controlador PID