Sintonização de controladores
Se for possível obter o modelo matemático que descreve o sistema em estudo, então é possível obter o valor dos parâmetros do controlador, que satisfaçam as especificações desejadas para a resposta transitória em regime permanente do sistema em malha fechada. Mas se não for possível obter o modelo matemático do sistema, então é necessário utilizar métodos experimentais par obter os parâmetros do controlador.
Ao processo de seleccionar os parâmetros adequados para responder aos requisitos pretendidos chama-se sintonização [30].
Métodos de Ziegler-Nichols
Ziegler e Nichols criaram um conjunto de regras para sintonizar controladores PID, baseando-se em resultados experimentais. Estas regras, para determinar os valores de ![]() ,
, ![]() e
e ![]() , baseiam-se na resposta transitória do sistema a estudar.
, baseiam-se na resposta transitória do sistema a estudar.
- Ziegler-Nichols em malha aberta
Este método de sintonização, para ser aplicado, necessita que o sistema em malha aberta tenha como resposta a um degrau de amplitude A uma curva do tipo S (curva de reacção do processo). Esta curva pode ser obtida experimentalmente ou por simulação.
Neste método o sistema pode ser aproximado por um sistema de primeira ordem com atraso.
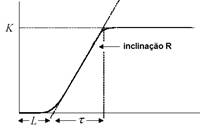
Curva em s
A curva pode ser caracterizada pelos parâmetros L (atraso) e τ (constante de tempo). Estes parâmetros são obtidos traçando uma tangente ao ponto de inflexão da curva, e determinando o ponto de intersecção da tangente com o eixo do tempo.
Obtendo os valores de R e L, pode-se calcular os valores ![]() ,
, ![]() e
e ![]() através da tabela 2.
através da tabela 2.
Tabela 2 - Tabela para cálculo dos parâmetros do controlador PID pelo método de Ziegler-Nichols em malha aberta
|
|
|
|
P |
|
- |
- |
PI |
|
|
- |
PID |
|
|
|
- Ziegler-Nichols em malha fechada
Neste método de sintonização deve-se colocar o sistema em malha fechada e usar apenas o controlador proporcional. Em seguida aplica-se variação em degrau na referência e vai-se aumentando o ganho do controlador até se obter na saída uma resposta oscilatória, figura 18. A frequência de oscilação é a frequência crítica, Wco.
Pode-se calcular então os valores do ganho último e do período último.
Ganho último: ![]() (74)
(74)
Período último: ![]() (75)
(75)
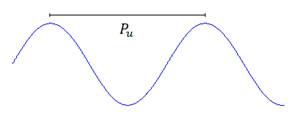
Oscilação constante com período Pu
Com os valores de ![]() e
e ![]() , já se pode obter os valores de
, já se pode obter os valores de ![]() ,
, ![]() e
e ![]() , através da tabela 3.
, através da tabela 3.
Tabela 3 - Tabela para cálculo dos parâmetros do controlador PID pelo método de Ziegler-Nichols em malha fechada
|
|
|
|
P |
|
- |
- |
PI |
|
|
- |
PID |
|
|
|