
Estela Bicho’s homepage |
|
University of Minho Engineering School Dept. Industrial Electronics Centre Algoritmi
Dept. Electrónica Industrial |


|
Videos |
|
To be updated with more videos and youtube links |
|
· Human-Robot Joint Action: Non-verbal interaction:i) Anticipatory Action Selection http://dei-s1.dei.uminho.pt/pessoas/estela/Videos/JAST/Video_Anticipatory_AS_April09.mpg
ii) The same observed action may have different means:
iii) Error/conflict monitoring: http://dei-s1.dei.uminho.pt/pessoas/estela/Videos/JAST/Video_ErrorMon_4.1_April09.mpg With verbal interaction:
Videos of the paper “Integrating verbal and nonverbal communication in a dynamic neural field architecture for human-robot interaction”, Bicho, Louro, Erlhagen, Frontiers in Neurobotics, can be found at: http://dei-s1.dei.uminho.pt/pessoas/estela/JASTVideosFneurorobotics.htm
Joint construction of a Toy:
Construction of Baufix objects:
|


|
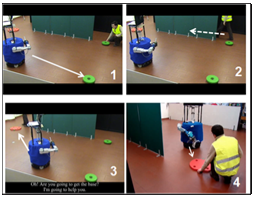
· Joint Search Task by teams of autonomous agents (robot-robot(s), robot(s)-human):
|
|
Videos on: · human-robot colaboration · Joint search tasks · Formation control · Object transportation by teams of autonomous robots · Floating robots · |
|
· Dynamic neural field model for target representation:
Cognitive properties of the dynamic field representing targets:
- Target detection and tracking:Video1 (.mov ) - Target selection / decision making:Video2 (.mov ) - Memory and forgetting: Video3 (.mov ) - Searching for sound sources in office environments:Video4 (.mov ) |
|
· Object transportation by teams of autonomous agents:
|
|
· Flexible Formation control for multiple mobile robots: a non-linear attractor dynamics approach Video1, Video2, Video3 (implementation on Khepera Robots) (.mpg)
http://www.autonomousrobotsblog.com/robot-formations-that-avoid-obstacles/ |
|
Simulated behavior of the robots in a situation which is completely symmetric for both robots, R1 and R2: Video 1 (.avi)
The importance of working memory in joint search tasks: Video 2 (avi), and video with real robots (mpeg)
Prediction and anticipation of ongoing behavior of the partner robot even when most of the motion trajectory is hidden from view (fig10): Video 3 (avi) and video with real robots (mpeg) |
|
- Object transportation & obstacle avoidance/ Cooperative transport: "Motion control of a mobile robot transporting a large size object in cooperation with a human: a nonlinear dynamical systems approach": (To see videos click: Video1, Video2) (.mpg)
- “Coordinated transportation with minimal explicit communication between robots: a non-linear attractor dynamics approach”: - Carrying a large size object in a cluttered environment: Video1 (.mpg) - Robots circumnavigating around on obstacle Video2 (.mpg) - Robots moving an 180º turn due to a dead-end Video3 (.mpg) |
|
|

|
|

|
|
![ThisPictureIllustratesTheUltimateGoalForThisPhDWork - [Original]](image4571.jpg)

|
(If you encounter a problem to download the files then please copy and paste each link to your browser address bar instead of clicking directly!) |
|
· The Powers of Prediction: Robots that Can read Intentions: Nominated for the IROS 2012 Jubilee video awards, i.e. "videos illustrating the history and/or milestones in intelligent robotics and/or intelligent systems in the last 25 years." http://www.youtube.com/watch?v=JisAUhyXzus&feature=youtu.be
http://spectrum.ieee.org/automaton/robotics/robotics-hardware/iros-2012-video-friday
|