Pêndulo invertido
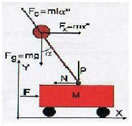
Neste sistema, existe um corpo de massa M que se desloca segundo o eixo dos x, e um pêndulo invertido, de comprimento l e massa m, ligado a parte superior do corpo de massa M e que se pode movimentar segundo o eixo dos x e do eixo dos y.
Pêndulo invertido
O pêndulo deve ficar equilibrado, variando a força F aplicada ao corpo de massa M, de maneira a que α tenda para 0.
Para este sistema consideram-se apenas as forças aplicadas segundo o eixo do x.
As forças aplicadas ao corpo M são a força F e a força N.
Logo pela lei de Newton
![]() (1)
(1)
![]() (2)
(2)
Sabe-se que ,
![]() (3)
(3)
Substituindo na equação (2), obtém-se
![]() (4)
(4)
Aplicadas ao pêndulo existem a força centrífuga Fc a força F segundo x, Fx, e a Força gravítica segundo x, Fgx.
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
Pela lei de Newton
![]() (8)
(8)
Então substituindo as expressões de Fc, Fx e Fgx na lei de Newton chega-se a
![]() (9)
(9)
Observando as equações (6) e (7), vê-se que estas equações não são lineares.
Para tornar o sistema linear, é necessário efectuar algumas aproximações.
 (10)
(10)
Assim as equações ficam
 (11)
(11)
Colocando as equações em ordem à derivada de maior grau obtém-se o seguinte sistema de equações de primeira ordem
 (12)
(12)
Efectuando as seguintes mudanças de variável
![]()
![]()
![]()
Obtém-se o seguinte sistema de equações
 (13)
(13)
Colocando em notação espaço de estados.
![]()
 (14)
(14)
Escolhendo como variáveis de saída o deslocamento x (![]() ) e o ângulo α (
) e o ângulo α (![]() )
)
![]()
![]()
Logo
 (15)
(15)